- Courriel
-
Téléphone
138-9017-4949
-
Adresse
No.1-2-204 1789, section 3, route de zuhua, Nouveau district de Tianfu, ville de Chengdu, Province du Sichuan
Catégories de produits
Sichuan Fick Technology Co., Ltd

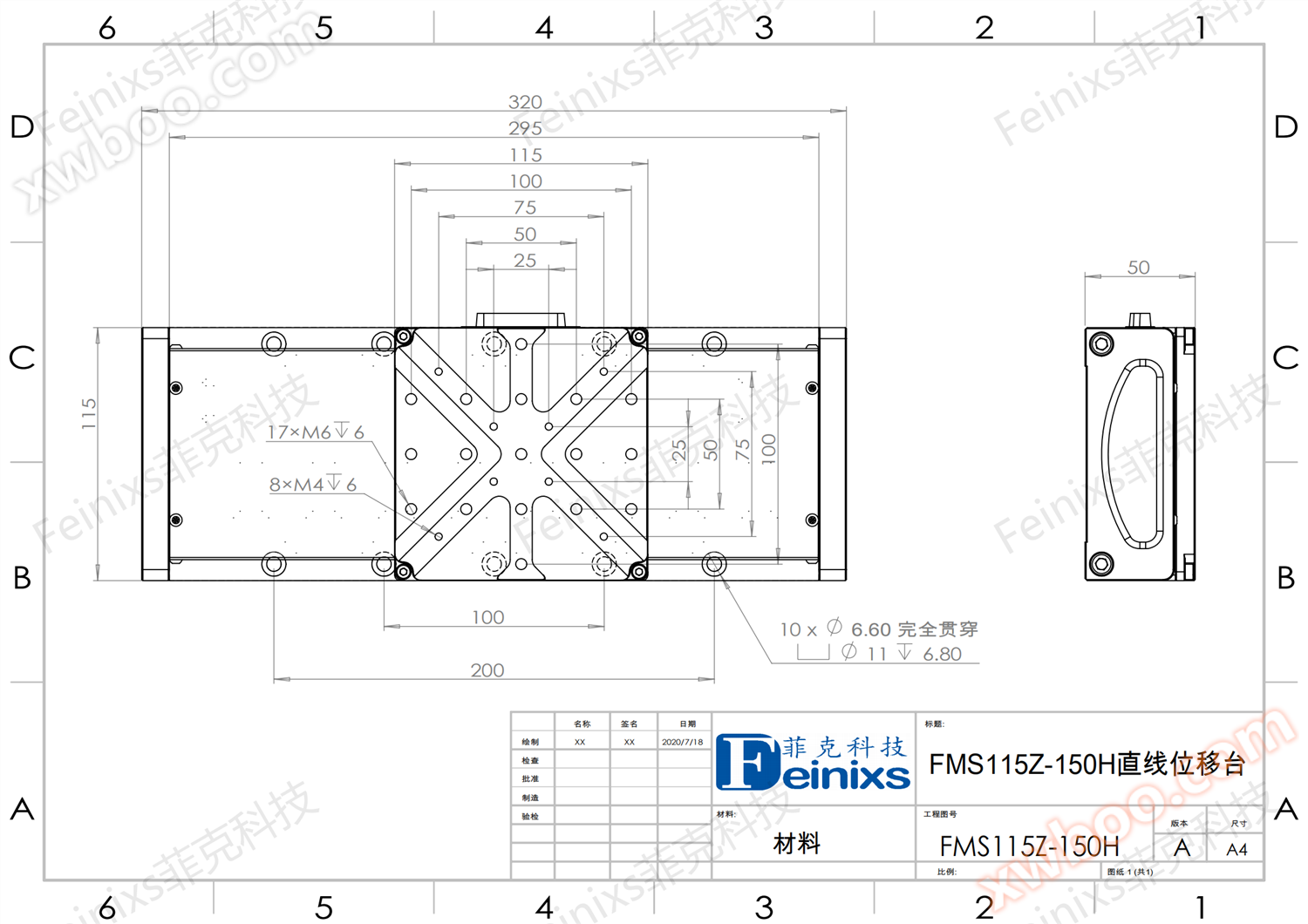
FMS115Z-150H
NégociableMise à jour sur03/05
- Modèle
- Nature du fabricant
- producteurs
- Catégorie de produit
- Lieu d'origine
Vue d'ensemble
Mouvement minimum incrémental 50nm
Détails du produit
Guide d'achat pour table de déplacement électrique Règles de dénomination des produits de la série feinixs Concepts de base du contrôle de déplacement
FMS115Z-150H
Spécifications détaillées paramètres
 |
(1) incrément de mouvement minimum 50nm (2) moteur linéaire sans noyau, réactif, accélération maximale à pleine charge jusqu'à 2000mm / s2 (3) super silencieux, adapté à un environnement de haute précision |
Spécifications détaillées paramètres
| Modèle de produit | FMS115Z-150H |
| Course (mm) | 150 |
| Charge (kg) | 10 |
| Résolution (Um) | 0.01 |
| Incrément minimum de mouvement (Um)【1】 | 0.05 |
| Précision de positionnement répétitif unidirectionnel / valeur garantie * (Um) | ± 0,1 |
| Précision de positionnement répétitif unidirectionnel / valeurs typiques * (Um) | |
| Précision de positionnement répétitif bidirectionnel / valeur garantie * (Um) | ± 0,3 |
| Précision de positionnement répétitif bidirectionnel / valeurs typiques * (Um) | |
| Précision / valeur garantie * (Um) | ± 1 |
| Précision【2】/ valeur typique * (Um) | |
| Vitesse maximale (MM / s) | 50 |
| Rectitude (Um) | 2 |
| Planéité (Um) | 2 |
| Yaw - biais (")【3】 | 5 |
| Pitch tangage (") | 5 |
| Poussée soutenue (n) | 20 |
| Poussée maximale (n) | 72 |
| Dimensions extérieures (mm) | 320X115X50 |
| Dimensions du comptoir (mm) | 115X115 |
| [1]: l'incrément de mouvement minimal n'est pas équivalent à la résolution, l'incrément de mouvement minimal étant la quantité minimale que le système de mouvement peut déplacer dans une situation continue et stable. En général, la résolution du système est bien inférieure à l'incrément de mouvement minimum. Compte tenu de l'influence de la structure de transmission et du codeur sur l'erreur du système, la table de déplacement du moteur rectiligne est plus proche de la résolution que la table de déplacement du moteur pas à pas. [2]: précision et précision de positionnement répétitif sont des concepts qui peuvent facilement être confondus. L'utilisation générale de la description du ciblage permet de distinguer facilement les deux concepts. [3]: seuls la rectitude, le parallélisme, le pitch, Yaw et d'autres paramètres atteignent des exigences de haut niveau, la précision du système de mouvement, la précision du positionnement répété peuvent atteindre un niveau de précision élevé. C'est - à - dire que les clients n'ont généralement besoin que de déterminer si la précision et la précision du positionnement répété répondent aux besoins de l'application pour choisir une plate - forme de déplacement satisfaisante. Les paramètres non axiaux sont à prendre en compte lorsque le client a des exigences plus élevées pour le mouvement de la plate - forme. *: voir le guide technique pour la différence entre les valeurs typiques et garanties |
|
Produit similaire Recommander




